The Motoron M2U256 Dual I²C Motor Controller offers a compact solution for controlling two DC motors using a UART serial interface . Multiple Motoron controllers can be connected to the same serial bus, making it easy to expand a system with additional motors.
Special Order
Shipping from $7.90
+91 more from our supplier in 7-10 days
Our Code: SKU-009770
Supplier Link: [Pololu MPN:5067]
 |
The Motoron M2T256 and M2U256 controllers make it easy to control two bidirectional, brushed DC motors using an I²C or TTL serial (UART) interface, respectively. These compact (0.6″ × 0.8″) boards operate from 4.5 V to 48 V and can deliver continuous output currents up to 1.8 A per motor. Multiple Motoron controllers can be configured to work on a single I²C or serial bus, allowing independent control of many motors. Unlike most of our motor drivers, the Motoron does not require any PWM outputs or timers on your microcontroller. Instead, only a single I²C or UART interface is needed regardless of how many Motorons you connect.
These Motoron controllers are available in several versions with different combinations of communication interfaces and connector options:
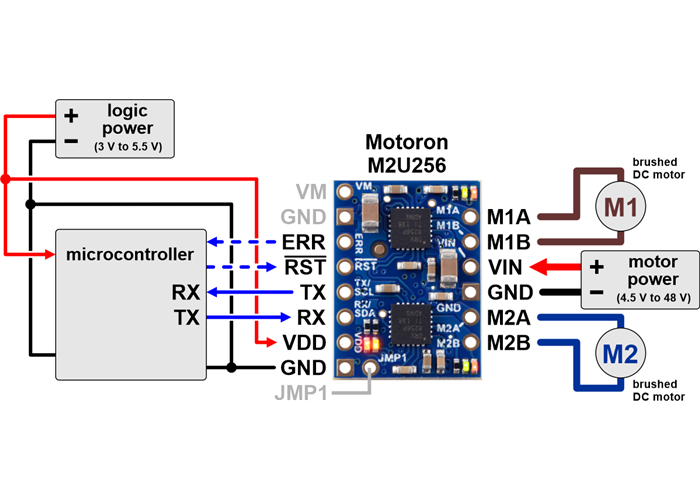
Typical wiring diagram for connecting a microcontroller to a Motoron M2U256 Dual Serial Motor Controller.
The M2U256 has a non-inverted TTL serial (UART) interface, and this version ships with a 1×16 breakaway male header included but not soldered in.
Motoron M2T256/M2U256 Dual Motor Controller with included headers. |
Motoron M2U256 Dual Serial Motor Controller, bottom view. |
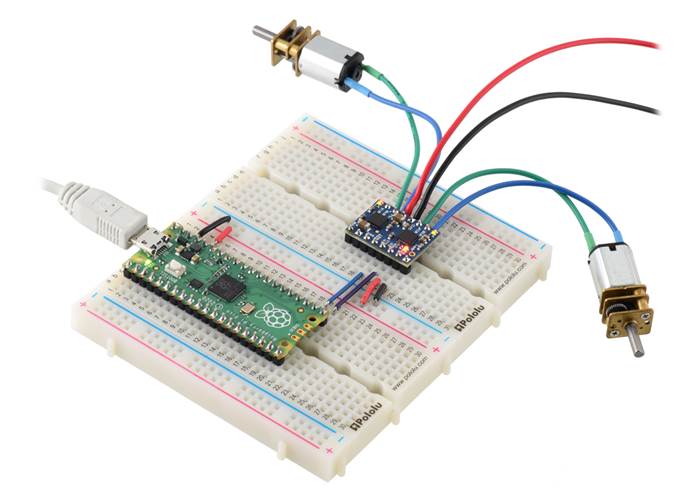
A Raspberry Pi Pico on a breadboard using a Motoron M2T256/M2U256 Dual Motor Controller to control two motors.
The tables below list the members of the Motoron family and show the key differences among them. Each type is available in several versions to provide different options for the through-hole connectors: they can be purchased as an assembled product with connectors soldered in, as a kit with connectors included but not soldered in, or (for Arduino and Raspberry Pi expansions) as a standalone board without connectors.
| Motoron motor controllers micro versions |
||
 M2T256 |
M2U256 |
|
|---|---|---|
| Control interface: | I²C | UART serial |
| Motor channels: | 2 (dual) | |
| Absolute max input voltage: |
48 V | |
| Recommended max nominal battery voltage: |
36 V | |
| Max continuous current per channel: |
1.8 A | |
| Available versions: | ||
| Motoron motor controllers Arduino and Raspberry Pi form factor versions |
|||||
 M3S256  M3H256 |
 M2S24v14  M2H24v14 |
 M2S24v16  M2H24v16 |
 M2S18v18  M2H18v18 |
 M2S18v20  M2H18v20 |
|
|---|---|---|---|---|---|
| Control interface: | I²C | ||||
| Motor channels: | 3 (triple) | 2 (dual) | |||
| Absolute max input voltage: |
48 V | 40 V | 30 V | ||
| Recommended max nominal battery voltage: |
36 V | 28 V | 18 V | ||
| Max continuous current per channel: |
2 A | 14 A | 16 A | 18 A | 20 A |
| Available versions for Arduino: |
M3S256 | M2S24v14 | M2S24v16 | M2S18v18 | M2S18v20 |
| Available versions for Raspberry Pi: |
M3H256 | M2H24v14 | M2H24v16 | M2H18v18 | M2H18v20 |
| Size: | 0.6″ x 0.8″ |
|---|---|
| Weight: | 1.5 g1 |
| Channels: | 2 |
|---|---|
| Model: | Motoron M2U256 |
| Control interface: | non-inverted TTL serial (UART) |
| Minimum operating voltage: | 4.5 V |
| Maximum operating voltage: | 48 V2 |
| Continuous output current per channel: | 1.8 A |
| Peak output current per channel: | 6.4 A |
| Reverse voltage protection?: | Y3 |
| Header pins soldered?: | N |
| PCB dev codes: | mc2u42a |
|---|---|
| Other PCB markings: | 0J13891 |

User’s manual for the Pololu Motoron Motor Controllers.
This DXF drawing shows the locations of all of the board’s holes.













