The UM7-LT orientation sensor from Redshift Labs is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates.
Special Order
Shipping from $9.90
+45 more from our supplier in 7-10 days
Our Code: SKU-003976
Supplier Link: [Pololu MPN:2763]
The UM7-LT orientation sensor from Redshift Labs is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates. This LT version of the UM7 does not have an enclosure.
The UM7 orientation sensor is a third-generation Attitude and Heading Reference System (AHRS) from Redshift Labs that produces attitude and heading estimates from triaxial accelerometer, rate gyro, and magnetometer data. Unlike a typical inertial measurement unit (IMU), which only provides raw sensor readings, the UM7 features an onboard microcontroller that combines sensor data using a sophisticated Extended Kalman Filter (EKF) to generate orientation estimates 500 times a second.
Two versions of the UM7 are available: the UM7 orientation sensor, which includes an enclosure, and the UM7-LT, which does not. The two versions are functionally equivalent, and both include a cable.
|
UM7-LT orientation sensor. |
The UM7 features a number of improvements over its predecessor, the UM6, including higher gyro bias stability and lower noise, a new communication architecture for improved flexibility, optional NMEA packet transmission, UTC time-synchronisation with external GPS, and support for third-order temperature compensation on all sensors. It takes advantage of newer MEMS (micro-electro-mechanical systems) technology that allows it to offer better performance at a lower price.
Connections for power and TTL serial communication can be made to the UM7 through a polarized five-pin male connector on one side, which mates with an included cable assembly. A pair of six-pin expansion headers on the other side of the board provide additional connectivity options, including an alternative SPI interface and a secondary serial interface that can be connected to an external GPS module (like our LS20031 GPS receiver). Additional cable assemblies for the expansion headers are not included.
You can use a general-purpose USB-to-TTL-serial adaptor, such as our CP2104 carrier or USB AVR programmer, to connect the UM7 to your computer. You can then use the Redshift Serial Interface (available in the “Resources” tab) to configure the sensor, and view and log data in real-time.
Product #2763 is the LT version of the UM7, which is just the UM7 electronics without the enclosure.
UM7-LT orientation sensor with included cable and U.S. quarter for size reference. |
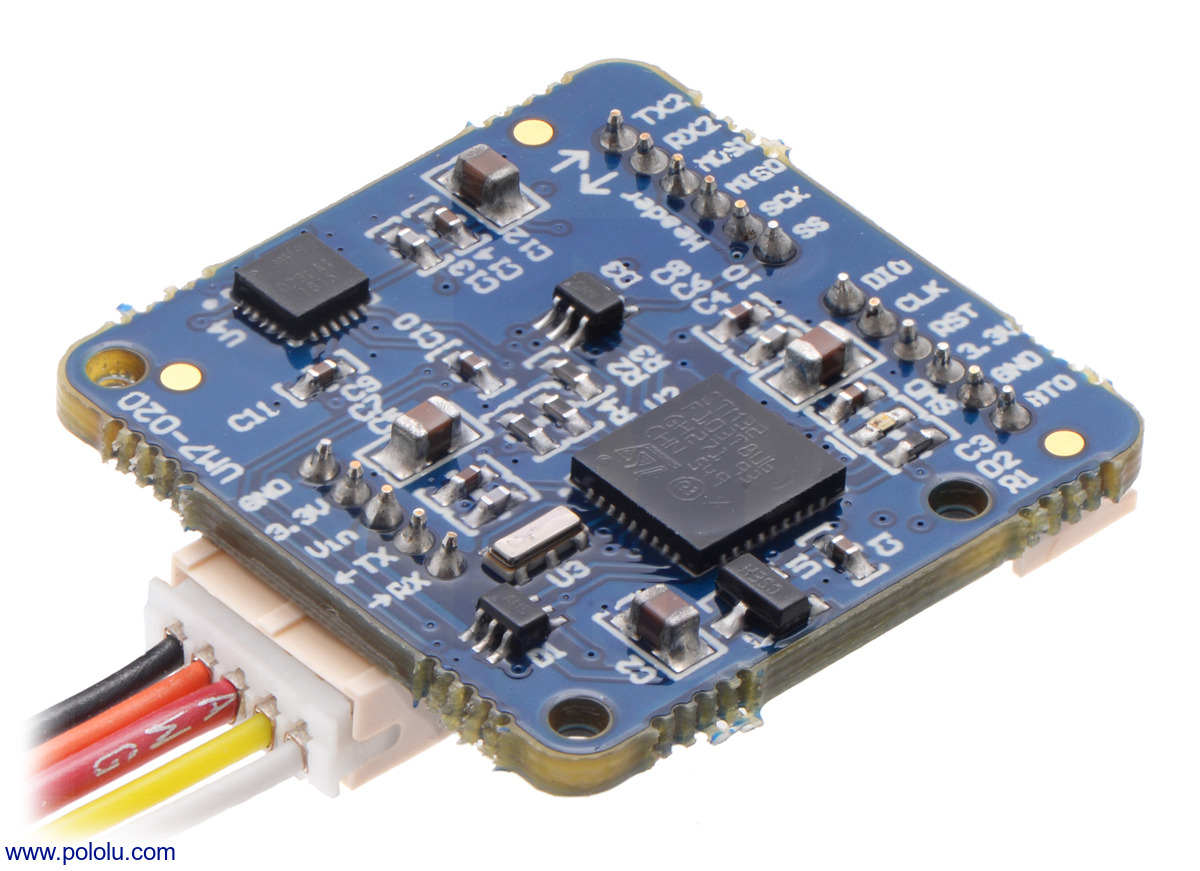
UM7-LT orientation sensor, bottom view. |
Board colour changes: In April 2020, the UM7-LT PCB solder mask colour changed from blue to white, and in February 2022 it changed to black. These changes are cosmetic and do not affect the functionality of the board.
|
|
UM7-LT orientation sensor. |
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
| Product Name | Sensors | Estimation | Other | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Gyros (3x) | Accels (3x) | Mag (3x) | Altitude | Roll | Pitch | Yaw | Quaternion | Enclosure | |
| Pololu MinIMU-9 v6 |  |
|
|
||||||
| Pololu AltIMU-10 v6 | |
|
|
|
|||||
| Redshift Labs UM7-LT Orientation Sensor | |
|
|
|
|
|
|
||
| Redshift Labs UM7 Orientation Sensor | |
|
|
|
|
|
|
|
|

Redshift Serial Interface.

Graph of gyro readings displayed by the Redshift Serial Interface connected to a UM7 orientation sensor.
The UM7-LT and UM7 orientation sensors were originally developed by CH Robotics, and Redshift Labs is now manufacturing and supporting them. Some components have been updated on these versions of the sensors, and the UM7-LT now ships with a conformal coating, but the sensors should otherwise be functionally identical to the previous versions.
| Size: | 1.06″ × 1.02″ × 0.26″ |
|---|---|
| Weight: | 3.5 g1 |
| Interface: | TTL serial, SPI |
|---|---|
| Minimum operating voltage: | 4 V |
| Maximum operating voltage: | 5.5 V |
| Maximum logic voltage: | 3.3 V2 |
| Axes: | pitch (x), roll (y), and yaw (z) |
| Measurement range: |
±2000°/s (gyro) ±8 g (accelerometer) ±12 gauss (magnetometer) |
| Supply current: | 50 mA |
| Case/enclosure?: | N |
Datasheet for the Redshift Labs UM7 orientation sensor, revision 1.8 (released July 30, 2018).
Version 3.1.5. The Serial Interface makes it easy to plot data in real-time, log data, and set configuration registers on the UM7 product line. Any Redshift Labs / CH Robotics device that communicates using the CHR binary serial protocol can be controlled using the Serial Interface.
Redshift Serial Interface. |
Graph of gyro readings displayed by the Redshift Serial Interface connected to a UM7 orientation sensor. |
This DWG drawing shows the locations of the mounting holes on the bottom side of the UM7 enclosure. The holes are threaded for M1.4 screws, and we recommend screwing no more than 3 mm (0.12″) into the mounting holes.
Note: this drawing is only applicable to UM7 units (product #2764) with the updated enclosure design that began shipping in September 2021.