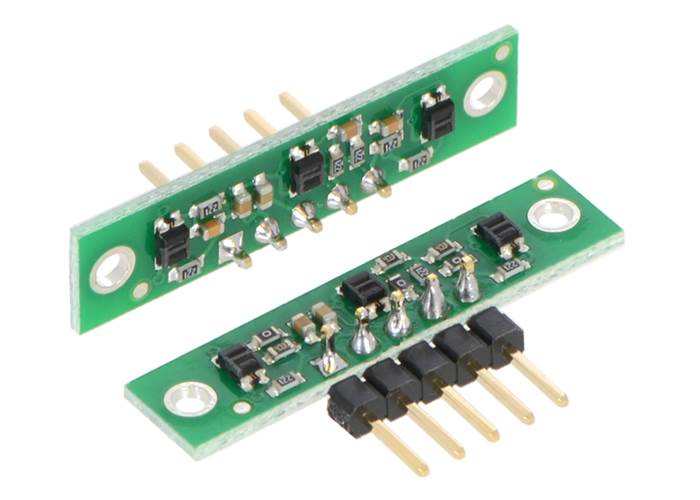
This compact module packs three IR LED/phototransistor pairs onto a 1.25″ × 0.3″ board. The sensors are mounted on a 0.375″ pitch, making this array a great minimal sensing solution for a line-following robot. Each sensor provides a separate analogue voltage output .
Special Order
Shipping from $7.90
+239 more from our supplier in 7-10 days
Our Code: SKU-003241
Supplier Link: [Pololu MPN:2456]
The QTR-3A reflectance sensor array requires analogue inputs to take readings. The similar QTR-3RC reflectance sensor array is available with digital I/O-compatible outputs.

QTR-3A or QTR-3RC reflectance sensor array on a 3/4" line with a quarter for size reference
The QTR-3A reflectance sensor array is intended as a line sensor, but it can be used as a general-purpose proximity or reflectance sensor. The module is a convenient carrier for three IR emitter and receiver (phototransistor) pairs. With sensors spaced at intervals of 0.375″ (9.525 mm) along of the board’s longer axis, this array works well as a minimal detector for line-following robots, as line-following courses are commonly made using 3/4″ (19 mm) black electrical tape. The middle sensor is slightly offset along the short axis of the board.
Each phototransistor is connected to a pull-up resistor to form a voltage divider that produces an analogue voltage output between 0 V and VCC (which is typically 5 V) as a function of the reflected IR. Lower output voltage is an indication of greater reflection.
The LED current-limiting resistors are set to deliver approximately 17 mA to the LEDs when VCC is 5 V, making the total board consumption just over 50 mA. The schematic diagram of the module is shown below:
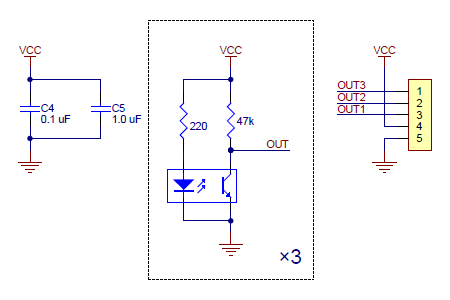 |
This schematic is also available as a downloadable pdf (115k pdf).
For an alternative array with eight sensors and the ability to turn off the IR LEDs to limit power consumption, consider our QTR-8A reflectance sensor array. For individual reflectance sensors, consider our QTR-1A and QTR-L-1A.

QTR sensor size comparison. Clockwise from top left: QTR-3RC, QTR-1RC, QTR-L-1RC, QTR-8RC

QTR-3A or QTR-3RC reflectance sensor array, bottom view with dimensions
There are several ways you can interface with the QTR-3A outputs:
This last method will work if you are able to get high reflectance from your white surface as depicted in the left image, but will probably fail if you have a lower-reflectance signal profile like the one on the right. (Please note that these images show the output of a QTR-1A, which uses a sensor with slightly different characteristics than the ones on the QTR-3A.)
QTR-1A output 1/8" away from a spinning white disk with a black line on it |
QTR-1A output 3/8" away from a spinning white disk with a black line on it |
Our Pololu AVR library provides functions that make it easy to use these sensors with our Orangutan robot controllers; please see the QTR Reflectance Sensors section of our library command reference for more information. We also have a Arduino library for these sensors.
This module has two mounting holes intended for #2 screws (not included); if the mounting holes are not needed, the ends of the PCB can be ground off to make the unit even smaller (less than 1″ wide). The reflectance sensor array ships with a 1×5 straight male header strip and a1×5 right-angle male header strip as shown below. You can also solder wires, such as ribbon cable, directly to the pads for the smallest installation.
QTR-3A or QTR-3RC reflectance sensor array with included header pins |
QTR-3A and QTR-3RC reflectance sensor arrays soldered in different orientations |
 Pololu QTR Reflectance Sensor Application Note (Printable PDF)
Pololu QTR Reflectance Sensor Application Note (Printable PDF)
Information about using the Pololu QTR-xA and QTR-xRC reflectance sensors, including sample oscilloscope screen captures of sensor outputs.
 Pololu AVR C/C++ Library User’s Guide (Printable PDF)
Pololu AVR C/C++ Library User’s Guide (Printable PDF)
Information about installing and using the C/C++ libraries provided for use with Pololu products.
 Arduino Library for the Pololu QTR Reflectance Sensors (Printable PDF)
Arduino Library for the Pololu QTR Reflectance Sensors (Printable PDF)
This guide explains how to use the QTRSensors library to read Pololu QTR sensors with an Arduino or A-Star 32U4 controller.
 Pololu AVR Library Command Reference (Printable PDF)
Pololu AVR Library Command Reference (Printable PDF)
A reference to commands provided in the Pololu C/C++ and Arduino libraries for the AVR.
 Building Line Following and Line Maze Courses (Printable PDF)
Building Line Following and Line Maze Courses (Printable PDF)
Step-by-step instructions for building your own line-following courses.